1 Introduction
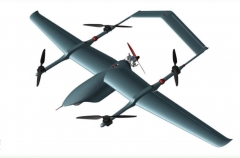
As a new unmanned flight platform, HW-V230 Oil-Electric Hybrid Vertical Takeoff and Landing UAV combines the characteristic of the fixed-wing UAV with long flight time and fast speed and the characteristic of the rotary-wing UAV with easy take-off and landing operations and low site requirements. The fixed wing part adopts the layout of single wingwith high chord ratio, inverted V-shaped tail, double tail brace and rear-engine; Thequadrotor section is combined with the double tail brace of the fixed wing section. UAV cancarry photoelectric pod and data link to complete reconnaissance, tracking, positioning andother tasks.
1.1 Main Technical Indexes
The main technical indexes of HW-V230 Oil-Electric Hybrid Vertical Take-off and Landing UAV are shown in table 1-1
Table 1-1 UAV Main Technical Index
1.2 Main Features
➢ No tools required for quick loading and unloading.
All connections of the whole machine are equipped with fast locking mechanism, without any tools, the assembly of the whole machine can be completed quickly with bare hands, and the electrical connection can be completed automatically when the mechanical connection is completed. It can be finished in 2 minutes from unpacking to assembling. The aircraft takes off directly from the transportation box after assembly.
➢ Good maintainability
Lithium battery pack and fuselage adopt quick loading and unloading mechanism, the replacement of battery can be completed within 10 seconds, and quickly take off again to perform tasks.
➢ Small carrying volume
A UAV, a set of spare batteries, a charger and a charger DC power supply, and a spare parts package can all be put into a 1.5m×0.6m×0.7m transport case
Specifications
- UAV dimensions (length×wing span×height) 2.2m×4.0m×0.6m
- Ceiling 3500m
- Max operation radius 50km (Optional)
- Cruise speed 80~110km/h
- Max speed 140km/h
- Endurance 6h Max
- Take-off weight 38kg Max
- Mission payload 5kg
- Navigation mode Combined navigation
- Power Gasoline/jet fuel, Lithium battery
- Take-off mode Completely autonomous vertical takeoff
- Landing mode Completely autonomous vertical landing